quadmaker
team

Jumlah posting : 3
Points : 9
komponen : 0
Join date : 18.12.10
 |  Subyek: IMU (Part III) Subyek: IMU (Part III)  Sun Dec 19, 2010 11:13 am Sun Dec 19, 2010 11:13 am | |
| ini kelanjutan dari IMU Part II, masih tentang penjelasan akselerometer. [justify]Perlu jadi catatan bahwa akselerometer secara aktual mengukur besarnya gaya yang dibebankan langsung pada arah yang berlawanan dari vektor akselerometer. Gaya ini sering disebut dengan gaya inersia. Satu hal yang penting anda pahami bahwa akselerometer secara tidak langsung mengukur percepatan yang terjadi akibat sebuah gaya yang dikenakan pada salah satu dinding (tentu berdasarkan apa yang kita bayangkan tadi). Gaya ini bisa disebabkan karena adanya akselerasi, dalam penjelasan selanjutnya, akan dijelaskan gaya ini bisa terjadi tanpa disebabkan oleh akselerasi. Jika kita meletakkan kubus (pada IMU Part II) dipermukaan bumi (ruang kerja anda misalnya), maka bola dalam kubus akan jatuh pada bidang Z- (berdasar aturan tangan kanan) dan kemudian menghasilkan gaya yang sebanding dengan 1g pada dinding bawah, seperti dididkripsikan oleh gambar berikut,  Dalam kasus ini, kubus dalam keadan statik, tidak bergerak dan tidak dikenakan gaya apapun dari luar, tapi kita tetap mendapati bahwa pada sumbu Z akselero menghasilkan pengukuran gaya sebanding dengan -1g(arah menuju pusat bumi). Tekanan yang ditanggung dinding Z- ini disebabkan oleh gaya gravitasi bumi. Dengan ilustrasi ini, cukup membuktikan bahwa pada hakikatnya, akselero meter tidak mengukur akselerasi dalam arti absolut, namun mengukur gaya, dimana gaya ini pada aktualnya salah satunya bisa disebabkan oleh akselerasi. Sejauh ini kita telah menganalisis keluaran dari akselerometer pada satu sumbu koordinat. Kebanyakan sensor akselerometer dipasaran adalah akselerometer dengan tiga derajad kebebasan, dan pada aplikasinya sensor tersebut mendeteksi gaya inersia dari seluruh sumbu koordinatnya. Mari kita kembali ke model kubus kita, lalu bayangkan kita memutarnya 45 deg searah jarum jam. Maka bola akan menyentuh dua dinding, Z- dan X- seperti pada gambar berikut. 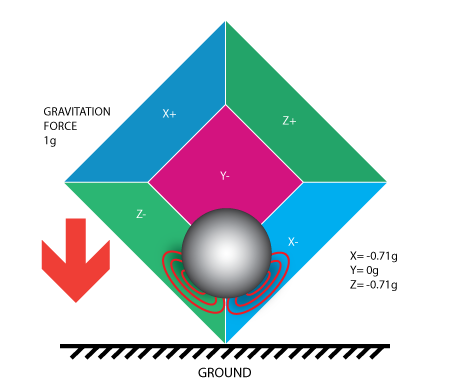 setelah anda memahami model diatas, selanjutnya akan memasuki model yang lebih matematis, tenang2,..ga terlalu sulit, anda cukup memahami trigonometri dan sedikit kinematik,..sampai jumpa di IMU Part IV | |
|
